自動運転技術・システムAutonomous driving technology

先進モビリティの自動運転技術の4つの特長
Features of Autonomous Driving Technology
先進モビリティの自動運転技術は、車両単体の自動化にとどまらず、地域交通や物流の課題を支える「社会実装」を前提に設計されています。
ハードとソフトを統合したシステム開発力と、全国での実証実績を強みに、信頼性の高い自動運転ソリューションを提供します。
特長01
社会課題解決を目指す東大発ベンチャー
先進モビリティは、少子高齢化による交通人材不足や地域の移動手段確保といった社会課題に向き合い、自動運転の実用化を通じて持続可能なモビリティの実現を目指しています。技術開発だけでなく、現場導入まで一貫して取り組むことが特長です。

特長02
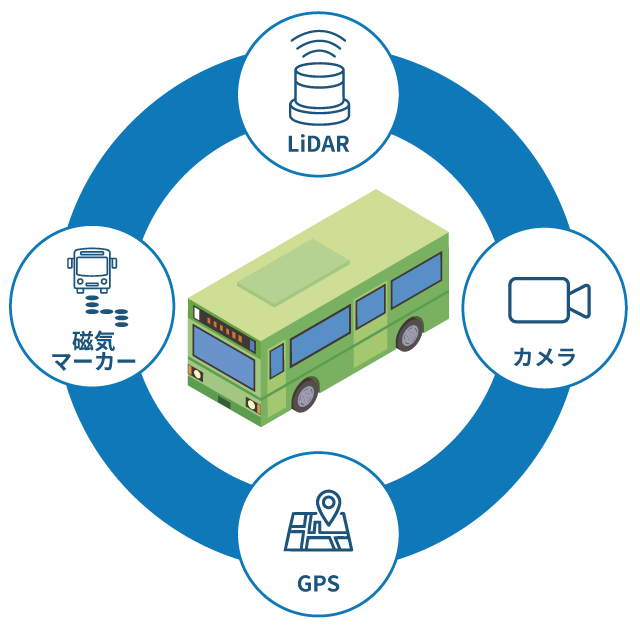
ソフト×ハードを統合する自動運転システム開発
自動運転には、LiDAR・カメラ・GNSS・磁気マーカーなどのセンシング、ルールベース・AIによる認識・判断、車両制御の高度な統合が不可欠です。先進モビリティは複数要素技術を一体設計し、現場で求められる安全性と信頼性を確保します。
特長03
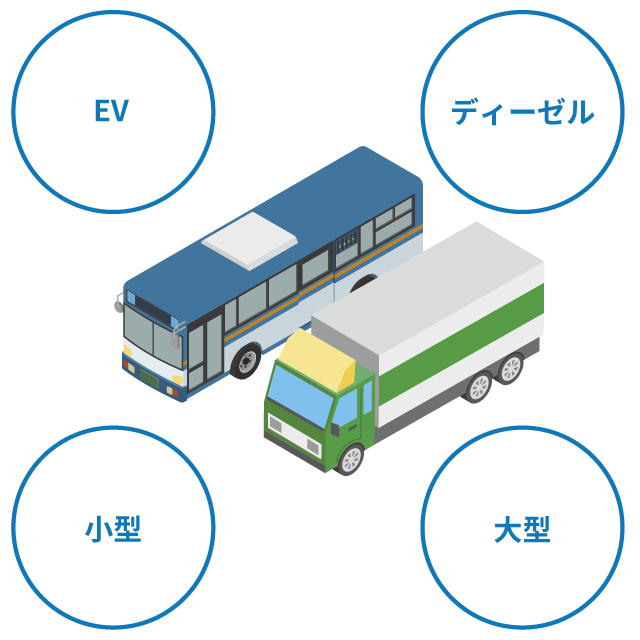
バス・トラックにおいて幅広い車種に対応
公共交通を担う大型バスから物流を支えるトラック、EVやディーゼルまで、用途や車両特性に応じて自動運転化をしてきた実績があります。運行環境や大型車から小型車まで車体サイズが異なる車種にも柔軟に対応し、人流・物流の両面から社会インフラの維持に貢献します。ユニバーサルデザイン推進にも貢献しています。
特長04
大型・中型バス実証実験で業界トップクラスの実績
自動運転レベル4の実現には、限定領域での安定運行とフェイルセーフ設計、継続的な検証が重要です。先進モビリティは大型車両での実証を重ね、実運用を見据えた技術成熟と安全性向上に取り組んでいます。
・歩行者や車両の動きを予測
・環境・状況に応じた速度での安全走行
・異常時は自動で安全停止(フェイルセーフ)
自動運転レベル4の解説
Level 4 Autonomous Driving
自動運転技術レベル4の定義
自動運転レベル4とは、運行設計領域(ODD)と呼ばれる特定条件下において、運転操作を含むすべての運転タスクをシステムが担う段階です。ドライバーの常時介入を前提とせず、安全確保まで含めて自動運転システムが責任を持つことが求められます。※レベル3との違い
レベル3:緊急時はドライバーが対応
レベル4:ドライバーの介入前提なし
自動運転レベル4の実現要素
- 高精度センシングとAI認識・制御技術
- フェイルセーフ設計と冗長システム
- 運行管理・監視体制の整備
- 法制度対応と社会受容性の確立
自動運転技術のレベル別早見表

先進モビリティは
ソフト×ハード、両対応
Software / Hardware
自動運転の実用化には、ソフトウェア開発だけでなく、車両を含むハードウェア設計までを一体で最適化することが欠かせません。
先進モビリティは両領域を自社で担うことで、現場で機能する信頼性の高いシステムを実現します。
ソフトウェア開発
「認知・判断・操作」を支える頭脳
先進モビリティのソフトウェア開発は、自動運転の中核となる「認知・判断・制御」を担います。交通環境をリアルタイムに解析し、安全な走行計画を生成することで、運行効率と安全性を両立。車両特性を理解した設計により、実運用に直結するアルゴリズムを構築。車両への実装と継続的な運行により、実用化へと繋げます。
主な開発領域:
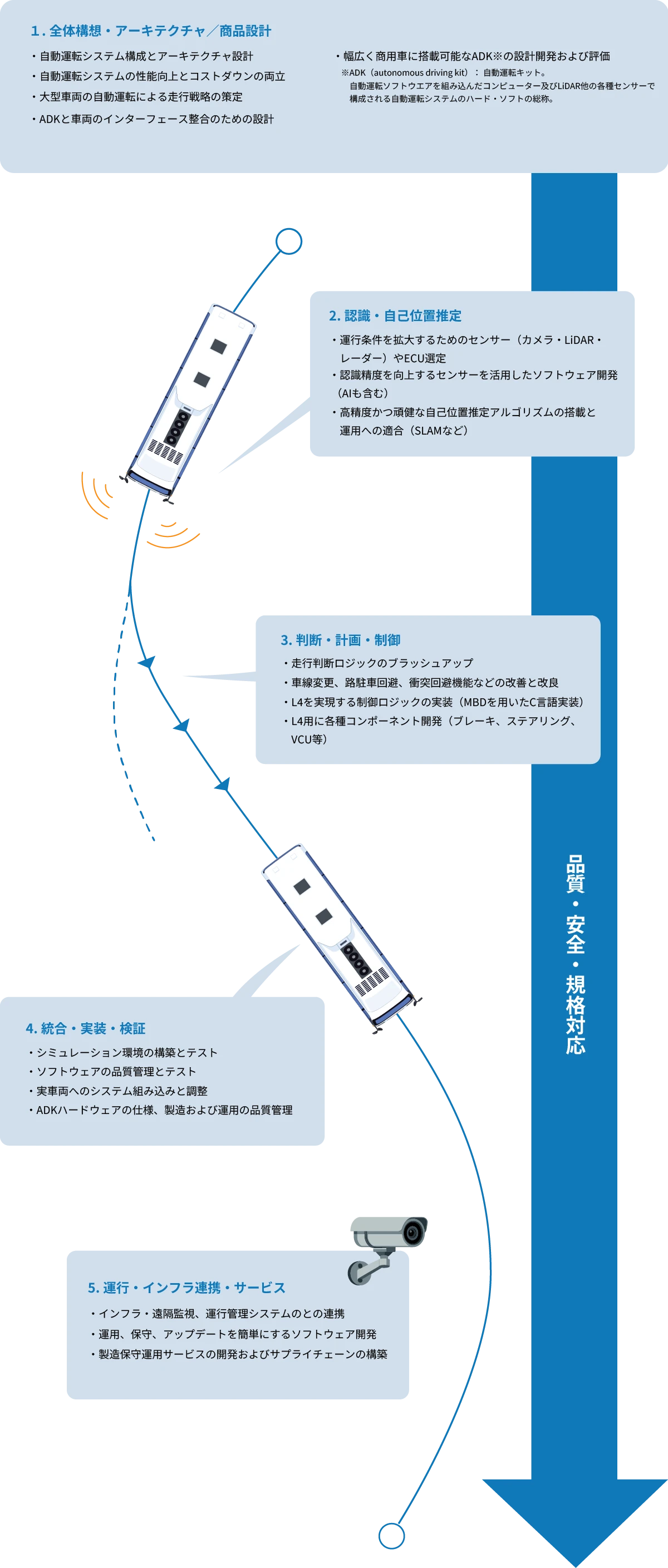
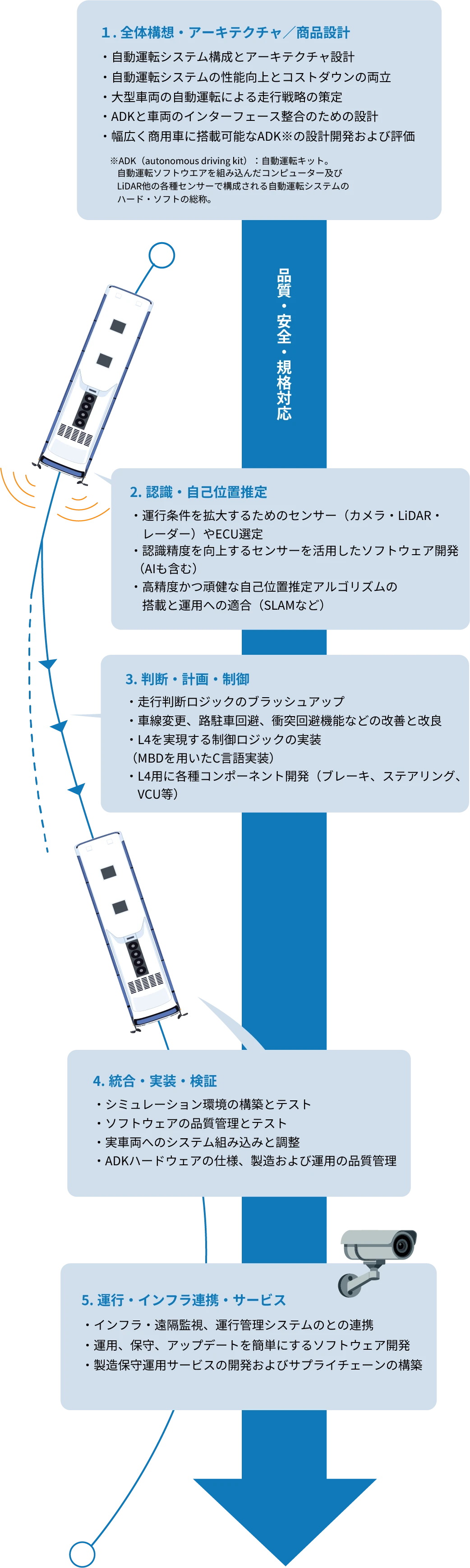
- 自動運転システム構成とアーキテクチャ設計
- 運行条件を拡大するためのセンサー(カメラ・LiDARレーダー)やECU選定
- 自動運転システムの性能向上とコストダウンの両立
- 認識精度を向上するセンサーを活用したソフトウェア開発(AIも含む)
- 高精度かつ頑健な自己位置推定アルゴリズムの搭載と運用への適合(SLAMなど)
- 大型車両の自動運転による走行戦略の策定
- 走行判断ロジックのブラッシュアップ
- 車線変更、路駐車回避、衝突回避機能などの改善と改良
- L4を実現する制御ロジックの実装(モデルベース、C言語)
- シミュレーション環境の構築とテスト
- ソフトウェアの品質管理とテスト
- インフラ・遠隔監視、運行管理システムのとの連携
- 実車両へのシステムの組込みと現地での適合
- 運用、保守、アップデートを簡単にするソフトウェア開発
ハードウェア開発
「安全と信頼」を形にする基盤
自動運転はソフトだけでは成立せず、センサー配置や車両改造、制御系統の冗長設計などハード面の完成度が安全性を左右します。先進モビリティは車両改造から統合検証まで自社で対応し、現場で求められる信頼性と耐久性を備えたシステムを提供します。
主な開発領域:
- 自動運転システム構成とアーキテクチャ設計
- 幅広く商用車に搭載可能なADK※の設計開発および評価
※ADK(autonomous driving kit):自動運転キット。自動運転ソフトウエアを組み込んだコンピューター及びLiDAR他の各種センサーで構成される自動運転システムのハード・ソフトの総称。 - ADKハードウェアの仕様、製造および運用の品質管理
- L4用に各種コンポーネント開発(ブレーキ、ステアリング、VCU等)
- ADKと車両のインターフェース整合のための設計
- 製造保守運用サービスの開発およびサプライチェーンの構築
ソフトウェア×ハードウェア技術の
使用領域
日本では希少な統合開発が可能な体制により、早急に社会のニーズに応えます。