Autonomous Driving Technology & Systems

Four Key Strengths of Advanced Smart
Mobility’s
Autonomous Driving Technology
Features of Autonomous Driving Technology
Advanced Smart Mobility’s autonomous driving technology is designed not only for vehicle
automation itself, but also for practical social implementation that supports regional
transportation and logistics challenges.
Leveraging integrated hardware and software
system development capabilities along with demonstration experience across Japan, we
provide highly reliable autonomous driving solutions.
Strength01
A University of Tokyo Spin-Off Venture Focused on Solving Social Challenges
Advanced Smart Mobility addresses social issues such as transportation workforce shortages caused by Japan’s aging population and declining birthrate, as well as the need to secure mobility access in local communities. Through the practical implementation of autonomous driving, we aim to realize sustainable mobility solutions. Our strength lies not only in technology development, but also in providing end-to-end support through on-site deployment.
Strength02
Integrated Autonomous Driving System Development Combining Software and Hardware
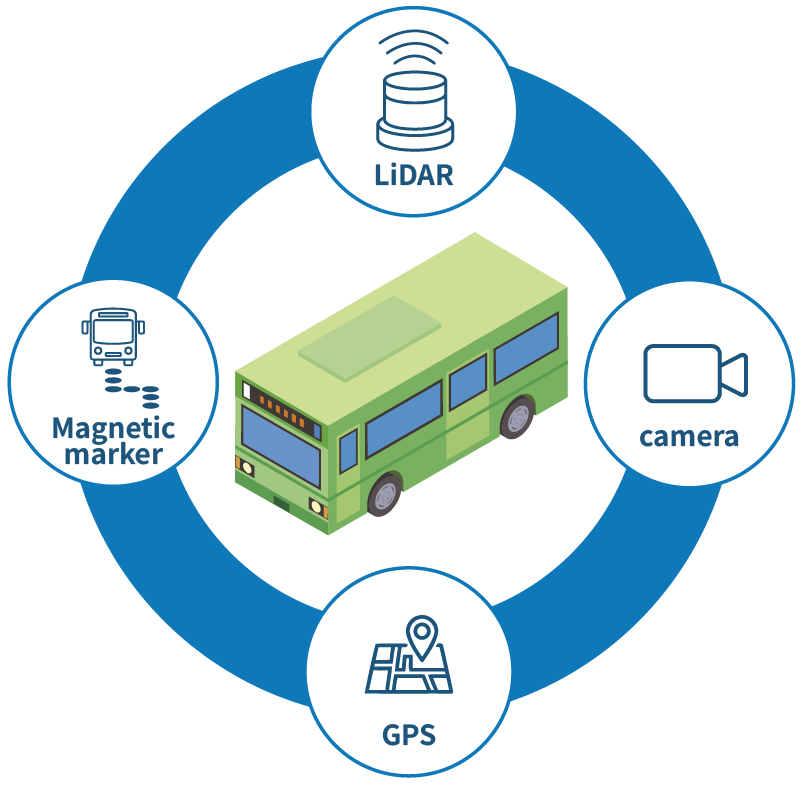
Autonomous driving requires sophisticated integration of sensing technologies such as LiDAR, cameras, GNSS, and magnetic markers, along with rule-based and AI-driven recognition, decision-making, and vehicle control systems. Advanced Smart Mobility designs and integrates these multiple core technologies as a unified system to ensure the safety and reliability required in real-world environments.
Strength03
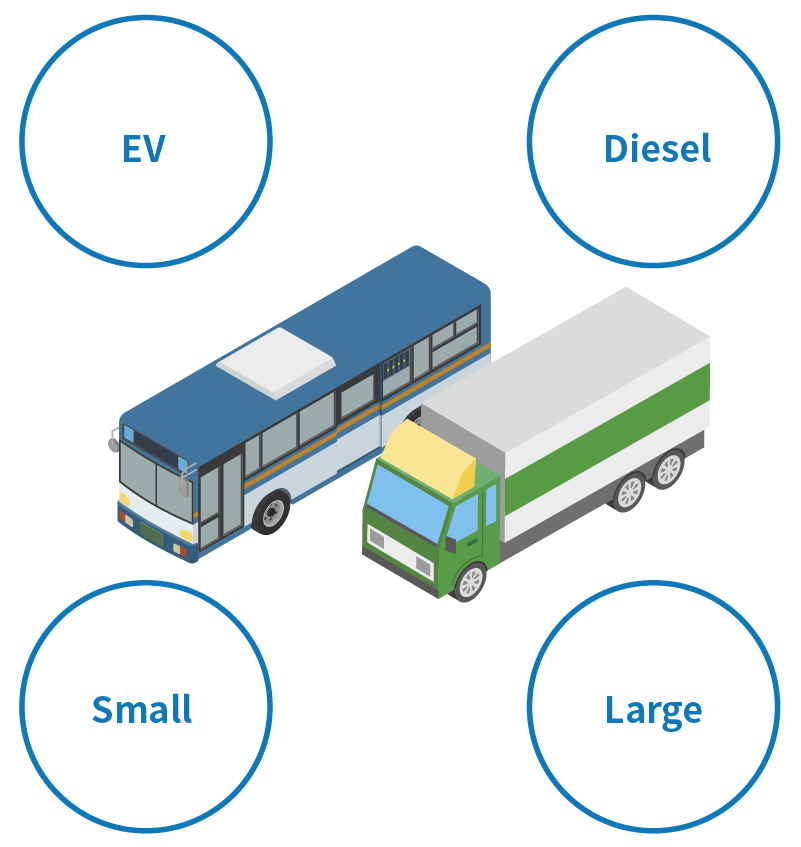
Supporting a Wide Range of Vehicle Types, Including Buses and Trucks
We have extensive experience implementing autonomous driving technologies for a wide variety of vehicles, including large buses for public transportation, logistics trucks, EVs, and diesel-powered vehicles, tailored to specific applications and vehicle characteristics. Our systems flexibly accommodate different operational environments and vehicle sizes, from compact vehicles to large commercial vehicles, helping sustain social infrastructure for both passenger and freight transportation. We also contribute to the promotion of universal design.
Strength04
Industry-Leading Demonstration Experience with Large and Mid-Size Buses
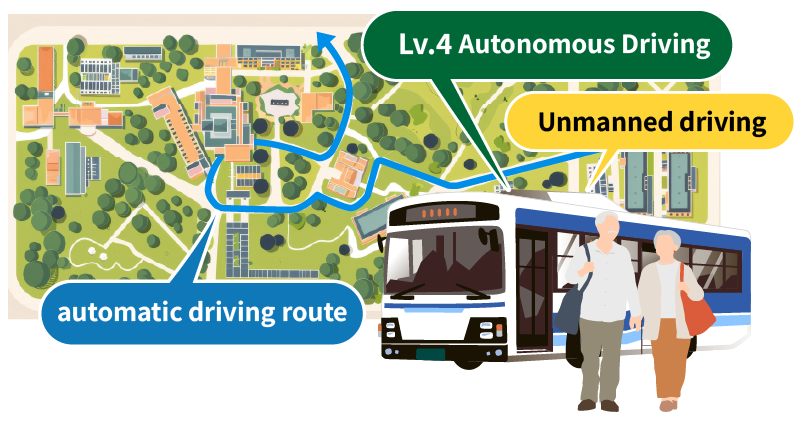
Achieving Level 4 autonomous driving requires stable operation within designated environments, fail-safe system design, and continuous verification. Advanced Smart Mobility has accumulated extensive demonstration experience with large vehicles and continues advancing technology maturity and safety improvements with practical deployment in mind.
・Predicting the movements of pedestrians and
vehicles
・Safe driving at speeds appropriate to environmental and traffic
conditions
・Automatic safe stop functions during abnormalities or emergencies
(fail-safe)
Explanation of Level 4 Autonomous Driving
Level 4 Autonomous Driving
Definition of Level 4 Autonomous Driving Technology
Level 4 autonomous driving refers to a stage in which the system performs all driving
tasks, including vehicle operation, under specific conditions known as the Operational
Design Domain (ODD). The system is required to take full responsibility for autonomous
operation, including maintaining safety, without assuming continuous driver
intervention.*Difference from Level 3
Level 3: Driver intervention is required
during emergencies
Level 4: No driver intervention is assumed
Key Requirements for Achieving Level 4 Autonomous Driving
- High-precision sensing and AI-based recognition and control technologies
- Fail-safe design and redundant systems
- Development of operation management and monitoring frameworks
- Compliance with legal regulations and establishment of public acceptance
Quick Reference Guide to Autonomous Driving Levels

Advanced Smart Mobility Provides Both
Software and
Hardware Solutions
Software / Hardware
The practical implementation of autonomous driving
requires not only software development, but also integrated optimization of hardware
design, including the vehicle itself.
By handling both domains in-house, Advanced
Smart Mobility delivers highly reliable systems that function effectively in real-world
environments.
Software Development
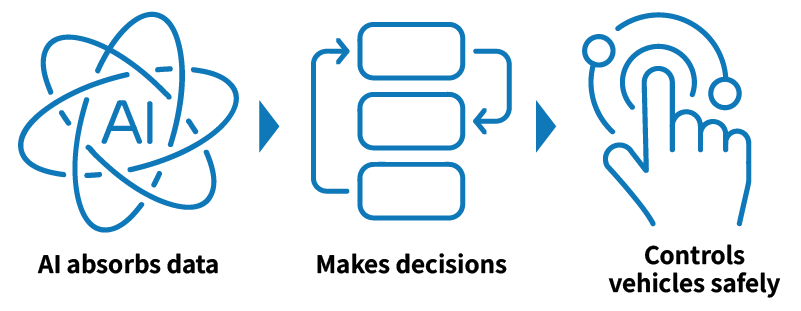
The Intelligence Behind “Perception, Decision-Making, and Control”
Advanced Smart Mobility’s software development is responsible for the core functions of autonomous driving: perception, decision-making, and control. By analyzing traffic environments in real time and generating safe driving plans, we achieve both operational efficiency and safety. Our designs are built with a deep understanding of vehicle characteristics, enabling the development of algorithms directly applicable to real-world operations. Through vehicle integration and continuous operational deployment, we advance toward practical implementation.
Main Development Areas:
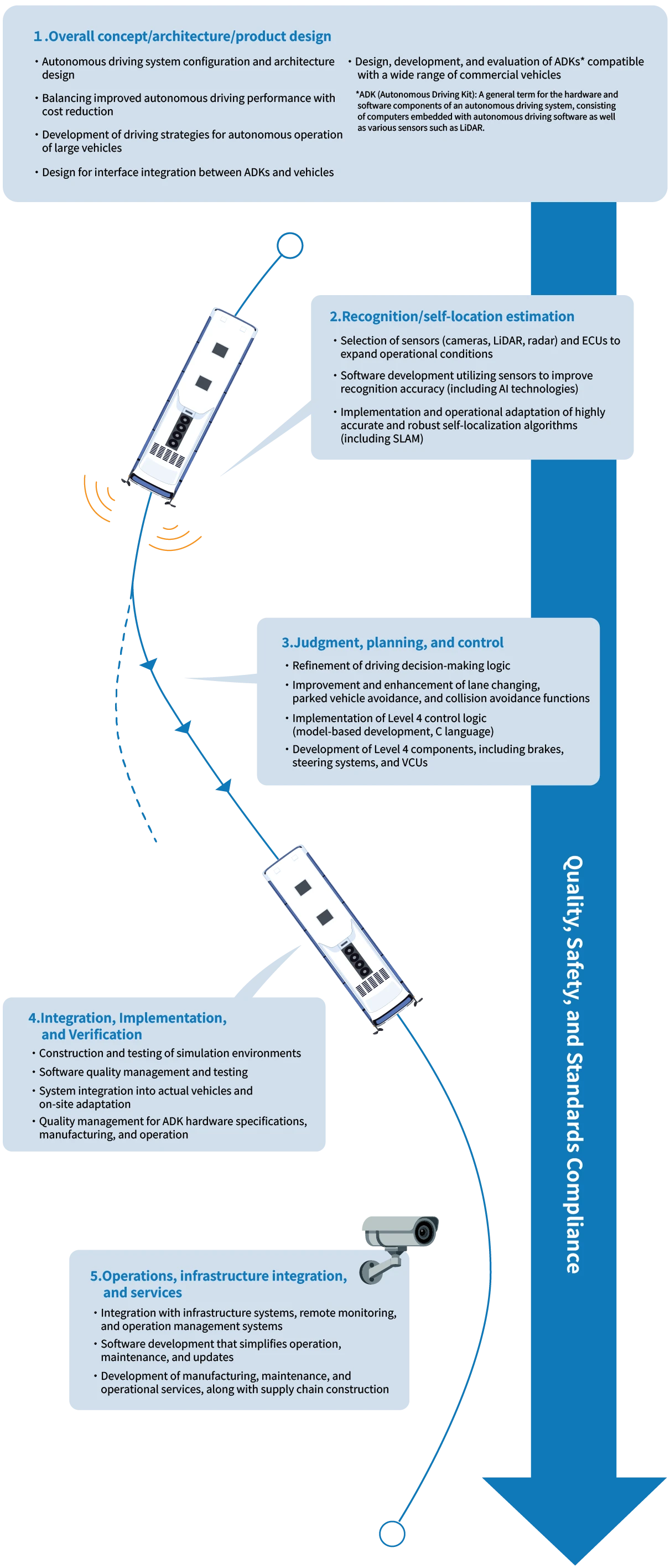
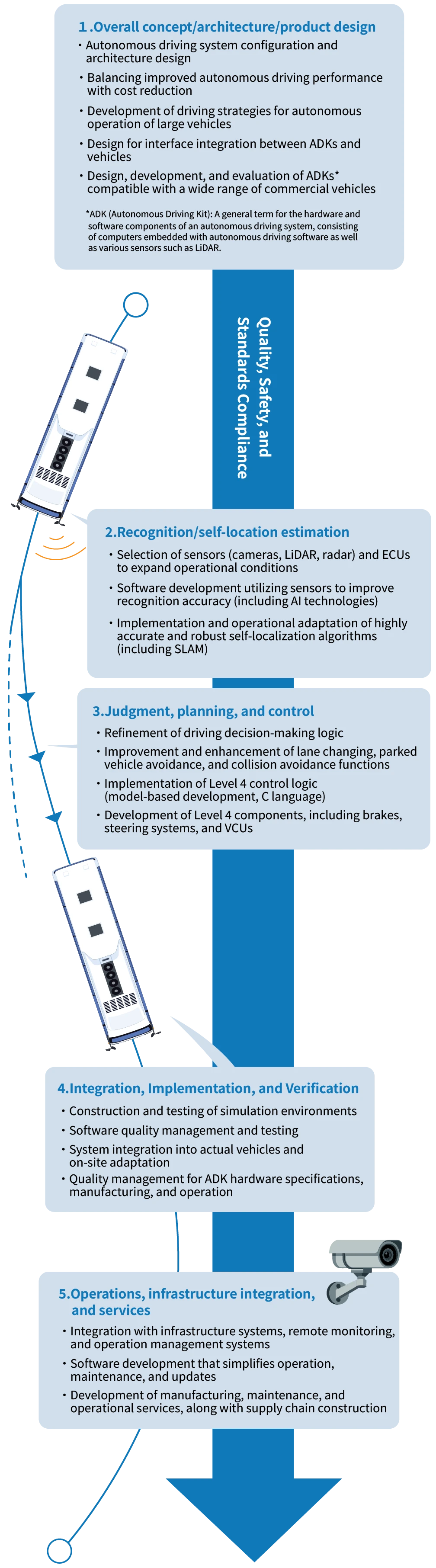
- Autonomous driving system configuration and architecture design
- Selection of sensors (cameras, LiDAR, radar) and ECUs to expand operational conditions
- Balancing improved autonomous driving performance with cost reduction
- Software development utilizing sensors to improve recognition accuracy (including AI technologies)
- Implementation and operational adaptation of highly accurate and robust self-localization algorithms (including SLAM)
- Development of driving strategies for autonomous operation of large vehicles
- Refinement of driving decision-making logic
- Improvement and enhancement of lane changing, parked vehicle avoidance, and collision avoidance functions
- Implementation of Level 4 control logic (model-based development, C language)
- Construction and testing of simulation environments
- Software quality management and testing
- Integration with infrastructure systems, remote monitoring, and operation management systems
- System integration into actual vehicles and on-site adaptation
- Software development that simplifies operation, maintenance, and updates
Hardware Development
The Foundation That Realizes Safety and Reliability
Autonomous driving cannot be achieved through software alone. The quality of hardware—including sensor placement, vehicle modifications, and redundant control system design—plays a critical role in ensuring safety. Advanced Smart Mobility handles everything in-house, from vehicle modification to integrated validation, enabling us to deliver systems with the reliability and durability required for real-world operation.
Main Development Areas:
- Autonomous driving system configuration and architecture design
- Design, development, and evaluation of ADKs* compatible with a wide range of
commercial vehicles
*ADK (Autonomous Driving Kit): A general term for the hardware and software components of an autonomous driving system, consisting of computers embedded with autonomous driving software as well as various sensors such as LiDAR. - Quality management for ADK hardware specifications, manufacturing, and operation
- Development of Level 4 components, including brakes, steering systems, and VCUs
- Design for interface integration between ADKs and vehicles
- Development of manufacturing, maintenance, and operational services, along with supply chain construction
Areas of Application for Software × Hardware Technologies
With one of the few integrated development structures in Japan, we are able to respond rapidly to society’s evolving mobility needs.